101
Technical Research |Abstracting the Human Systems
100
Technical Research |Abstracting the Human Systems
While this non-linearity can provide life-like movements within the simulation, there is still a crucial aspect that needs to be considered for a crowd simulation. In the physical world, there are limits to forces- a ball does not instantly fall to the ground, vehicles do not instantly go from 0 to 100km/h, and humans do not instantly get from one location to the next. Therefore, an additional scalar variable is needed to represent that maximum speed.
Although humans can move at a large range of speeds, they generally have a preferred speed that varies depending on personal factors such as value of time,[6] energetics,[7] biomechanics,[8] visual flow,[9] and exercise,[10] which in turn can be influenced by environmental or social factors such as temperature, “population size, economic conditions, and cultural values.”[11] This preferred speed can then be broken down into two main modes of locomotion: walking and running.[12] Walking is the slower of the two forms, with speeds ranging from 0.3 to 2.0 m/s, whereas running is the faster state with speeds ranging from 2.0 to 5.0 m/s.[13] Of these two modes, walking is the generally more preferred mode due to its lower energy usage,[14] with running generally reserved for urgency and exercise. Considering this, it is then possible to utilize these general statistics as a starting point for setting the maximum speed to simulate a believable human crowd. While these various factors can all be utilized to calculate this scalar value, it would increase the complexity of the model substantially. As such, simply predefining an approximate number at this stage should suffice for conveying human motion. Translating this into machine logic is then a simple case of normalizing the velocity vector variable and multiplying it by the maximum speed scalar variable.
6 Mark Wardman, “Public Transport Values of Time,” Institute of Transport Studies, University of Leeds, Working Paper 564 (2001): 1-56, accessed October 17, 2019, http://eprints.whiterose.ac.uk/2062/1/ITS37_WP564_uploadable.pdf.
7 R. Mcneill Alexander, “Energetics and Optimization of Human Walking and Running: The 2000 Raymond Pearl Memorial Lecture,” American Journal of Human Biology 14, no. 5 (2002): 641-48, doi:10.1002/ajhb.10067.
8 J. Maxwell Donelan, Rodger Kram, and Arthur D. Kuo, “Mechanical Work for Step-to-Step Transitions Is a Major Determinant of the Metabolic Cost of Human Walking,” The Journal of Experimental Biology 205 (August 2002): 3717-3727.
9 Betty J. Mohler et al., “Visual Flow Influences Gait Transition Speed and Preferred Walking Speed,” Experimental Brain Research 181, no. 2 (2007): 221-228, https://doi.org/10.1007/s00221-007-0917-0.
10 Catrine Tudor-Locke and David R Bassett, “How Many Steps/Day Are Enough?,” Sports Medicine 34, no. 1 (2004): 1-8, https://doi.org/10.2165/00007256-200434010-00001.
11 Robert V. Levine and Ara Norenzayan, “The Pace of Life in 31 Countries,” Journal of Cross-Cultural Psychology 30, no. 2 (1999): 201, doi:10.1177/0022022199030002003.
12 Mohler et al., “Visual Flow Influences Gait Transition Speed and Preferred Walking Speed,” 221-222.
13 A. E. Minetti, “The three modes of terrestrial locomotion,” In Biomechanics and Biology of Movement, ed. Benno Maurus Nigg, Brian R. MacIntosh, and Joachim Mester (Human Kinetics, 2000), 69-72.
14 Alexander, “Energetics and Optimization of Human Walking and Running: The 2000 Raymond Pearl Memorial Lecture,” 641.
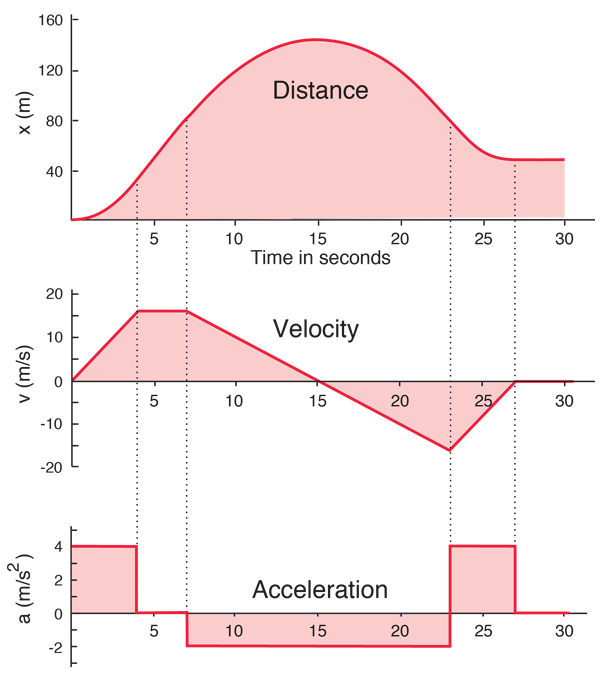
The relationship between distance, velocity, and acceleration
From “Motion Graphs,” accessed December 27, 2019, http://hyperphysics.phy-astr.gsu.edu/hbase/Mechanics/motgraph.html.