117
Technical Research |Abstracting the Human Systems
116
Technical Research |Abstracting the Human Systems
Sensory System
The last system to establish is the sensory system, which allows the agents to collect input data from the environment, similar to how humans can perceive their surroundings. This system functions at the highest level of the human systems and is responsible for generating a list of available elements to choose from within the space before deciding which task to perform within the decision logic system.
The five traditional senses of the human body consist of sight, hearing, taste, smell, and touch.[27] Of these five senses, however, the most utilized sense in typical crowd navigation is undoubtedly sight. This is evident when one considers that while most people would have little trouble walking around with headphones on, they would find it much more challenging with their eyes closed. For this reason, this prototype will mainly utilize sight for obtaining information for the agents within their virtual environment. While there are benefits in adding other primary motivators (such as sound-based navigation for visually-impaired occupants), it is beneficial to keep the systems simple at this proof-of-concept prototyping stage. Much like other aspects, additional senses can be introduced later depending on the project and the medium being utilized for visualizing said project.
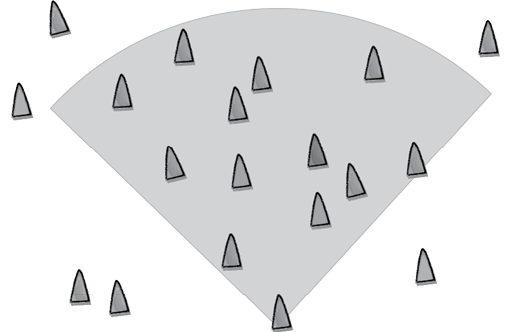
Recalling the introduction of autonomous agents in Chapter 2.2, one of the main concepts is that they have a limited ability to perceive the environment. Therefore, it is time once again to define some human limits for the system. A quick investigation reveals that “the visual field of a normal human eye measures (from point of fixation) 100 degrees temporally, 60 nasally, 75 superiorly and 60 inferiorly. Binocular (using both eyes) visual fields are approximately 200 degrees wide and 135 degrees tall, with a region of binocular overlap that is 120 degrees wide.”[28] (Fig. 2.3.30 - 31) These angles can be translated to machine logic by utilizing the dot product, which allows the acquisition of the angle between any two vectors. In doing so, an if/else condition can be set, where only objects within a certain angle of the agent’s line of sight will be added to the list of available elements. (Fig. 2.3.32)
Once a list of objects that the agent can see is acquired, the agent will then need to differentiate what those objects are. When an agent sees a door, they might be attracted to it, whereas when they see a wall, they might try to avoid it. This is of course highly situational to the intended purpose of the space; objects within a gallery will attract people as it can be assumed that people came to see them, whereas advertisements at a train station might have less attraction since they are not the main purpose of the space. Similarly, an emergency door might not attract people until there is an emergency, whereas a highly ornate wall might attract people even though they cannot go through it. Nevertheless, due to these varying requirements, defining categories such as walls, thresholds, people, and architectural elements becomes necessary. In doing so, the agents will be able to differentiate between the type of object they
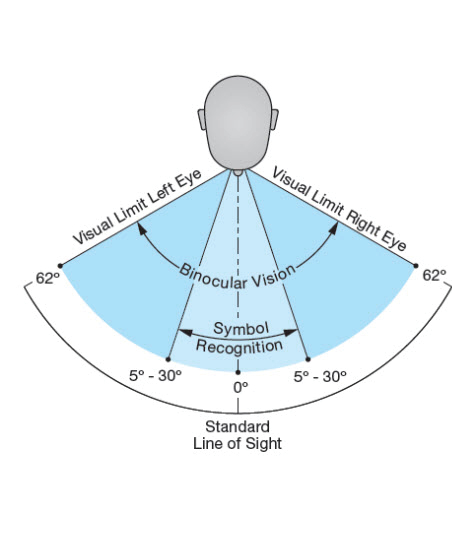
Human Visual Limit- Top View
From “Environmental Considerations and Human Factors for Videowall Design,” Extron, accessed December 28, 2019, https://www.extron.com/article/environconhumanfact.
are seeing and calculate an action accordingly. The agent will undoubtedly see many elements at once, therefore, the ability to distinguish between these objects will allow it to better choose which element they want to interact with.
The next step is to then identify and categorize the various elements within the simulation system. Once this is done, individual IDs can be assigned to each class of entities, where other descriptive variables can be assigned to further customize these elements depending on their functionality within the space. These objects will require customization for each design instance as a function of the purpose of the space, which will be discussed further in the next chapter (2.4) of this thesis.
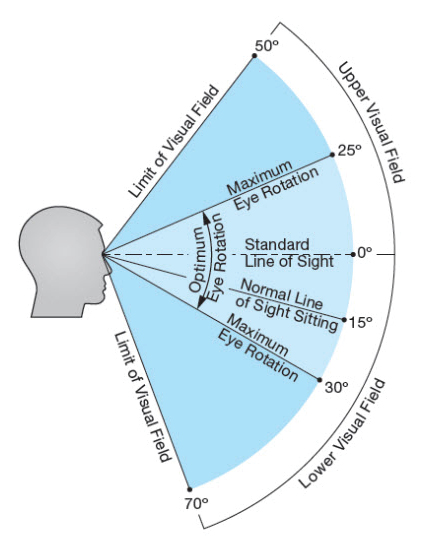
Human Visual Limit- Side View
From “Environmental Considerations and Human Factors for Videowall Design.”
Sensory limit within simulation