
93
Technical Research |Abstracting the Human Systems
92
Technical Research |Abstracting the Human Systems
Abstracting the Human Systems
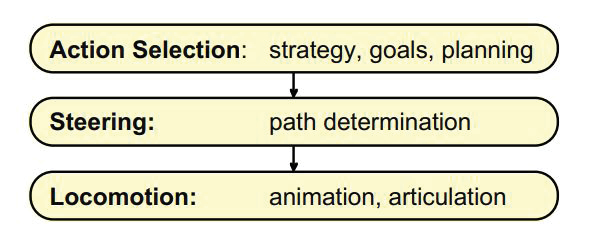
As stated in Chapter 2.2, occupied architectural space can be broken down into its components of active human agents and passive (or active in the case of dynamic spaces) architectural objects. This chapter will focus on establishing the simulation model for the active human agents by building upon Craig Reyonalds’ boids model. Within Reynolds’ paper “Steering Behaviors For Autonomous Characters,” he refers to autonomous agents as “idealized vehicles” or “boids,” and described their motion as three layers: action selection, steering, and locomotion.[1] (Fig. 2.3.1)
Action selection is the process of selecting the action depending on the calculated goal of the vehicle.
Steering is the calculated forces that is applied to the vehicle after deciding the action.
Locomotion is the method of how the vehicles move to their goals.
Naturally, human agent behaviors are a bit more complex than vehicles. The three layers established by Reynolds only described motion; therefore, it is vital to build upon this to describe the other attributes of human agents. While these three layers present an idea of how the agents can move around the environment, the question still remains as to how the agents obtain information and decide on their tasks. Considering these functional requirements, it is then possible to simplify human behaviors into three main systems: the sensory system, the decision logic, and the pathfinding.
The sensory system allows the agents to see their surroundings.
The decision logic allows the agents to choose a goal based on what they see.
The pathfinding allows the agents to find a way to the goal that they chose.
These systems function in a hierarchal sense in which one system feeds into the next. The agents would utilize the sensory system to obtain information from the environment. It would then use this information within the decision logic to decide which entity from the environment interests them. It would then utilize the pathfinding system to navigate to the entity of interest. By acknowledging this, one can begin building the systems by looking from the bottom level up. (Fig. 2.3.2 - 3)
Three hierarchical layers of motion behaviors
Craig Reynold’s Flocking model describes these complex patterns with 3 simple steps along with 3 simple steering behaviours.
From Craig W. Reynolds, “Steering Behaviors For Autonomous Characters,” Reynolds Engineering & Design, accessed October 17, 2019, http://www.red3d.com/cwr/steer/gdc99/.
Three hierarchical layers of human behaviors
Human behaviors can be simplified into 3 main systems: the Sensory System, the Decision Logic, and the Pathfinding. Each system requires the consideration of their human counterparts to set up.
Illustrated by Author.
Sensory System
Decision Logic
HUMAN BEHAVIOURS
Pathfinding






