
85
Technical Research |Establishing Model Methodology
84
Technical Research |Establishing Model Methodology
There are, of course, many ways to do this. A quick investigation reveals a plethora of existing simulation methodologies, ranging from Eulerian-based models such as Cellular Automata,[6][7] to Lagrangian-based particle models such as Craig Reynold’s Boids,[8] Helbing’s Social Forces,[9] Van den Berg’s Reciprocal Velocity Obstacles,[10] Adaptive Roadmaps,[11] Centroidal Particles,[12] and HiDAC.[13] (Fig. 2.2.5 - 10) While all these different methods can be overwhelming for someone without an extensive coding background, one commonality among these models is the utilization of autonomous agents. (Fig. 2.2.4) Taking a cue from the Lagrangian methodology, it is then imperative to treat crowd simulations as an example of a multi-agent dynamic system, where the overall system can be broken down into agents and operations. Much like how the water simulation can be broken down into water particles, and the mathematical models used to describe how individual particles affect each other, a crowd simulation can be broken down into the people (agents), and the human interactions between them (operations). To create this system, one must understand the principles of intelligent autonomous agents, which are entities that can act in their environment without external influences from a leader or global plan. These entities have three key concepts that should be kept in mind when establishing them:
“An autonomous agent has a limited ability to perceive the environment.”[14]
“An autonomous agent processes the information from its environment and calculates an action.”[15]
“An autonomous agent has no leader.”[16]
Distinguishing these concepts allows the creation of custom categories that are specific to crowds, which will ensure a simpler foundation in the translation from physical behaviors to virtual code. From here, one can begin to establish the systems that allow these autonomous agents to operate as humans within the simulation. As such, this simulation model will be focusing on determining the interactions between autonomous agents and their environment.
Ehsan Baharlou states in his thesis Generative Agent-Based Architectural Design Computation: Behavioral Strategies for Integrating Material, Fabrication and Construction Characteristics in Design Processes:
“Complex systems, which exhibit holistic behaviors, are difficult to comprehend. Complex behaviors, which arise from interactions among parts, need a model to gain insight into processes that exhibit emergent phenomena. […] Therefore, a model should be simple enough to represent its main purpose. The purpose of self-organizing a system is adaptation with dynamic complexity arising from emergent phenomena. Avoiding unnecessary details allows models to maintain a reasonable level of complexity (Miller and Page 2007, pp. 36-37).[17]
17 John H. Miller and Scott E. Page, Complex Adaptive Systems: An Introduction to Computational Models of Social Life (Princeton, NJ: Princeton University Press, 2007), 36-37.
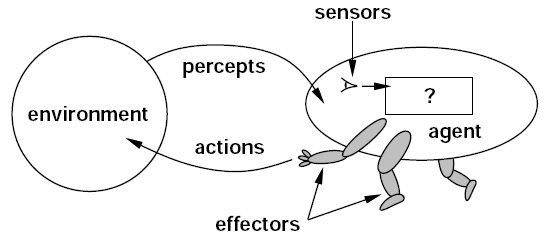
Much like how humans interact with spaces, Autonomous Agents act within the simulation through its perception of the environment
By Stuart Russell and Peter Novig, “Intelligent Agents - Chapter 2,” from Artificial Intelligence: A Modern Approach, obtained from “Agents: Artificial Intelligence,” accessed December 25, 2019, https://www.doc.ic.ac.uk/project/examples/2005/163/g0516334/.

